2009-12-16[n年前へ]
■エクセルでシミュレーション Vol.10 二次元非定常熱伝導問題シミュレーション+P(ID)制御エクセルシートを作ってみよう 
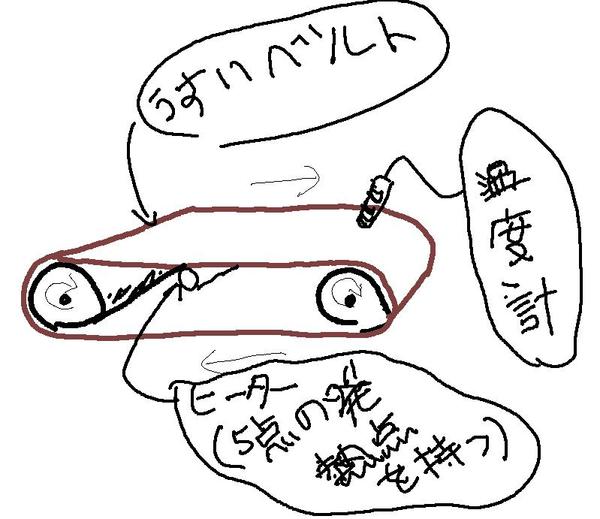 「エクセルでシミュレーション Vol.9 二次元非定常熱伝導問題の温度変化グラフも作ってみよう」で、二次元非定常熱伝導問題を解くシートを使いながら(実用的範囲では三次元問題と大差がない)、ヒーターで回転するベルトを高温にした場合の、その回転ベルトの温度分布がどのように変化していくかを計算し、グラフ化し、さらにベルト中の一部分の温度を時系列的にモニターする機能を付けた、シートで遊んでみました。
「エクセルでシミュレーション Vol.9 二次元非定常熱伝導問題の温度変化グラフも作ってみよう」で、二次元非定常熱伝導問題を解くシートを使いながら(実用的範囲では三次元問題と大差がない)、ヒーターで回転するベルトを高温にした場合の、その回転ベルトの温度分布がどのように変化していくかを計算し、グラフ化し、さらにベルト中の一部分の温度を時系列的にモニターする機能を付けた、シートで遊んでみました。
そこで、今回は、センシングしたベルトの温度を用いて、ヒーターの温度を簡単なPID制御を使ってフィードバック制御するエクセル・シートを作ってみることにしましょう。
PID制御とは、調整量を(現在の)出力値と目標値との差に比例=Proportionalした量、その(過去からの)積分=Integralに応じた量、および(その瞬間に次にどのように変化するかという)微分=Differentialに応じた量にしたがって変える制御です。言いかえれば、現在(Proportional)・過去(Integral)・未来(Differential)の挙動に応じて、制御調整量を変えてやろうという制御です。比較的、古典的な制御手法ですが、現在でも、もっとも一般的な制御手法です。
 まずは、前回のエクセル・シートでヒーター部分を単純に(計算をさせ始めてから=回転ベルトに対するヒーターを動かし始めてから)100℃にし続けた場合の計算過程を示してみます。つまり、何の制御もしない場合です。その計算結果が、下の動画です。上の動画で上に示したグラフが、回転ベルトの温度分布を示したグラフです(回転ベルトを切り開いたように温度分布を示しています)。動画中の下の折れ線グラフは(上のコンター図で灰色丸部の温度の時間変化を示したグラフです)。ちなみに、縦軸は0℃から150℃までで、横軸が時間軸です。
まずは、前回のエクセル・シートでヒーター部分を単純に(計算をさせ始めてから=回転ベルトに対するヒーターを動かし始めてから)100℃にし続けた場合の計算過程を示してみます。つまり、何の制御もしない場合です。その計算結果が、下の動画です。上の動画で上に示したグラフが、回転ベルトの温度分布を示したグラフです(回転ベルトを切り開いたように温度分布を示しています)。動画中の下の折れ線グラフは(上のコンター図で灰色丸部の温度の時間変化を示したグラフです)。ちなみに、縦軸は0℃から150℃までで、横軸が時間軸です。
下の折れ線グラフを見れば、上のコンター図で灰色丸で示した部分の、温度が時間に応じて上昇し、やがて100℃近くになっていることがわかります。
 さて、次にPID制御を行ってみることにしましょう。…とはいえ、最初は簡単のために、「灰色丸で示した部分の温度と目標調整温度である100℃との差をヒーターに足す(ネガティブ・日―ドばっく)」という「P=比例成分=現在の違い」だけを利用したP(ID)制御を行ってみます。つまり、現在の出力と目標出力の差異のみをヒーター出力に(適当な比率で)足し合わせてみるのです。言いかえれば、ベルトの温度が0℃なら、ヒーターを200℃くらいにすることで、急激にベルトを温め温度を調整し、目標温度100度と現在のベルト温度の差が小さくなってきたら、ヒーターの温度を110℃くらいに変えてやる・・・というような制御をしてみます。そんなシミュレーション計算を行ってみた結果が、下の計算結果になります。ちなみに、ヒーターの制御温度はエクセルのシートでB32セルで計算されています。また、灰色丸のセンサ取り付け部分(を示した)の温度を示す下の折れ線グラフは、先ほどと同じく、縦軸は0℃から150℃までの温度を示し、横軸が時間軸となっています。
さて、次にPID制御を行ってみることにしましょう。…とはいえ、最初は簡単のために、「灰色丸で示した部分の温度と目標調整温度である100℃との差をヒーターに足す(ネガティブ・日―ドばっく)」という「P=比例成分=現在の違い」だけを利用したP(ID)制御を行ってみます。つまり、現在の出力と目標出力の差異のみをヒーター出力に(適当な比率で)足し合わせてみるのです。言いかえれば、ベルトの温度が0℃なら、ヒーターを200℃くらいにすることで、急激にベルトを温め温度を調整し、目標温度100度と現在のベルト温度の差が小さくなってきたら、ヒーターの温度を110℃くらいに変えてやる・・・というような制御をしてみます。そんなシミュレーション計算を行ってみた結果が、下の計算結果になります。ちなみに、ヒーターの制御温度はエクセルのシートでB32セルで計算されています。また、灰色丸のセンサ取り付け部分(を示した)の温度を示す下の折れ線グラフは、先ほどと同じく、縦軸は0℃から150℃までの温度を示し、横軸が時間軸となっています。
この結果動画を見るとわかるように、「P=比例成分=現在の違い」だけを利用したP(ID)制御(=積分成分と微分成分を使わない)制御では、ベルトの温度は早く立ち上がりますが、ベルトの温度は振動して、なかなかすぐに安定してくれません。しかも、早く温度を立ち上げようとすると、温度振動は大きくなってしまい、温度振動を防ごうとすると、なかなか温度が早く立ち上がってくれない、という相反する関係になっています。いわば、(ある程度、減衰がある)強いバネと弱いバネの振動と同じような現象が起きてしまいます。
 さて、それでは、一体どうしたら良い制御ができるのでしょうか。・・・せっかく、簡易にエクセルのような(表計算=スプレッドシート・ソフトウェアを使った)熱伝導方程式を使ったシミュレーション計算を行うことができる環境があるわけですから、今回扱ったPID制御のような古典的な制御をもう少し復習してみようと思います。
さて、それでは、一体どうしたら良い制御ができるのでしょうか。・・・せっかく、簡易にエクセルのような(表計算=スプレッドシート・ソフトウェアを使った)熱伝導方程式を使ったシミュレーション計算を行うことができる環境があるわけですから、今回扱ったPID制御のような古典的な制御をもう少し復習してみようと思います。
そして、せっかく熱伝導方程式を計算してみたりしているわけですから、そういった微分方程式(つまり現在から未来を示す式)を使うことで実現できる、最適化制御についても考えてみることにします。
2010-01-01[n年前へ]
■Rubyで書いた単純なカルマンフィルタの出力グラフ例
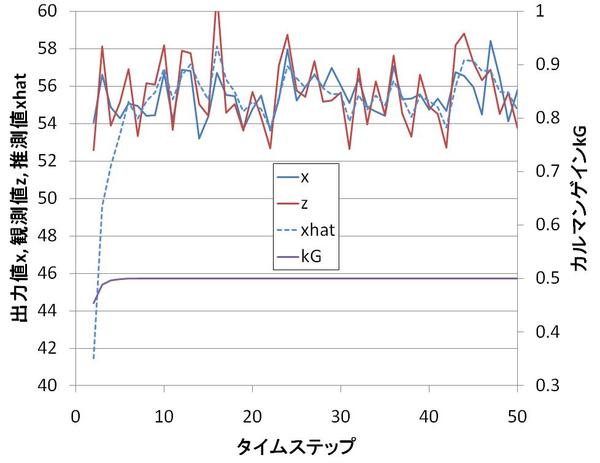
「Rubyで単純なカルマンフィルタを書いてみた」ので、そのスクリプトの動作させた場合の出力結果をグラフにしてみました(RubyソースはsimpleKalman.rbとしてここに置いておきました)。
Ruby simpleKalman.rb 50 > simpleKalman.csvという風にCSVファイルにして、Excelで開き、結果を示したのが下のグラフです。観測ノイズがある中で(観測値が朱線で示したzです)、水色点線で示したxhat(この単純例では出力量の推定値)が、水色で示したx(この単純例では出力量)をそこそこ推定できているようです。

![]() さて、次は「C言語で整数演算だけを使いこの単純な例を実装するときの苦労をする」か「エクセルで説明用の実装をする」か、はたまた、もう少し面白そうなモデルベース予測あるいはシミュレーション計算予測との組み合わせ(たとえば、アクティブ制御のブラ)実現にでも挑戦してみるようか悩んでいるところです。
さて、次は「C言語で整数演算だけを使いこの単純な例を実装するときの苦労をする」か「エクセルで説明用の実装をする」か、はたまた、もう少し面白そうなモデルベース予測あるいはシミュレーション計算予測との組み合わせ(たとえば、アクティブ制御のブラ)実現にでも挑戦してみるようか悩んでいるところです。