2008-05-15[n年前へ]
■PSoC制御の「加熱ホッケーブレード」や「堅さ可変シューズ」 
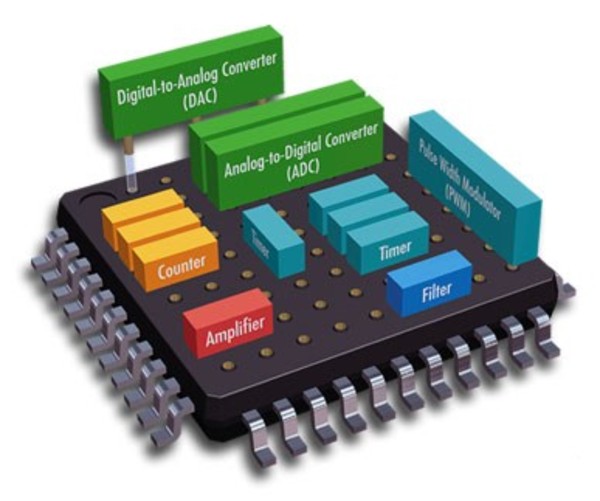 PSoCはCypress社のマイコン・チップで、各種デジタル・アナログ回路が搭載されていて、その組み合わせをユーザがプログラミング(設計)できる、というものだ。FPGAほど高性能ではないけれど、PICより少し賢く便利なアナログ回路が色々詰めあわされている(だから周辺回路を大幅に減らすことができる)、という感じだろうか。アナログ制御・入出力をしたい場合には、とても便利そうなチップである。
PSoCはCypress社のマイコン・チップで、各種デジタル・アナログ回路が搭載されていて、その組み合わせをユーザがプログラミング(設計)できる、というものだ。FPGAほど高性能ではないけれど、PICより少し賢く便利なアナログ回路が色々詰めあわされている(だから周辺回路を大幅に減らすことができる)、という感じだろうか。アナログ制御・入出力をしたい場合には、とても便利そうなチップである。
 このPSoCが使われている商品で面白いなぁ、と思うのが「Therma Blade」と「adidas_1, intelligence level 1.1.」だ。
このPSoCが使われている商品で面白いなぁ、と思うのが「Therma Blade」と「adidas_1, intelligence level 1.1.」だ。
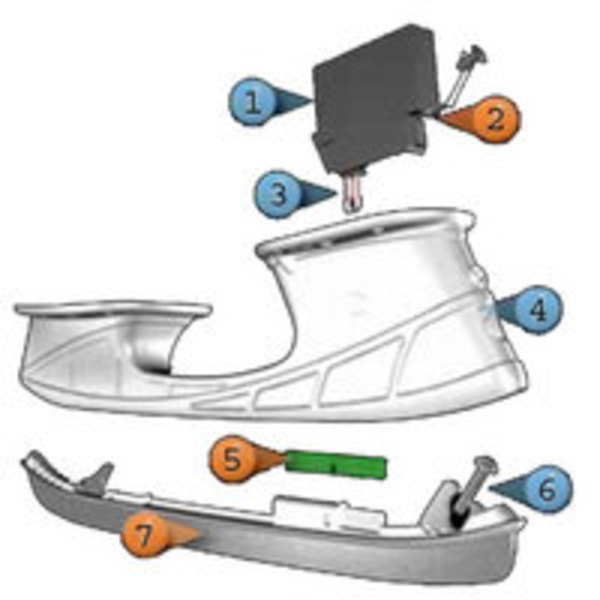
Therma Bladeの方は、アイス・ホッケー・シューズのブレード(氷と接触する金属板部)の氷との摩擦係数を低くし、スピードを高めるために、PSoCでヒーター制御し、ホッケー・シューズ・ブレードの温度を適正に調整したり、ON/OFFしたりするものである。スケートが滑るのは、ブレードと氷の間で氷が解け水になることで、摩擦係数が下がるだ。それならば、「ブレードの温度を上手く制御してやれば、摩擦係数が下がりスピード速く滑ることができる」という狙いの技術である。

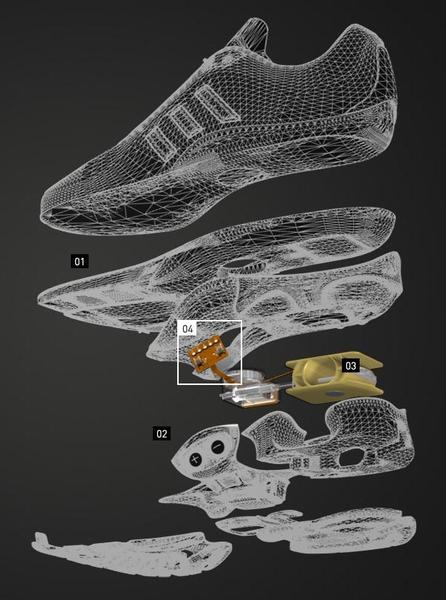 一方、adidas_1, intelligence level 1.1.の方は、PSoCで制御したモータで踵部分にあるエアクッション部を押すことで、エアクッション内圧力=靴の堅さ(衝撃吸収率)を適正に変える、というものだ。電子制御されている車のサスペンション機構(タイヤと車ボディの間で、路面の凹凸・カーブなどがあるときの衝撃を吸収する機構)も多いけれど、それと同じような技術が搭載されたシューズである。
一方、adidas_1, intelligence level 1.1.の方は、PSoCで制御したモータで踵部分にあるエアクッション部を押すことで、エアクッション内圧力=靴の堅さ(衝撃吸収率)を適正に変える、というものだ。電子制御されている車のサスペンション機構(タイヤと車ボディの間で、路面の凹凸・カーブなどがあるときの衝撃を吸収する機構)も多いけれど、それと同じような技術が搭載されたシューズである。
こういったシューズで高機能・高付加価値の流れはどれだけ進んでいくのだろうか。いつか、「トランジスタ技術4月号」で、「フレッシャーズのためのアイスホッケーシューズ制御のABC」といった特集記事が当たり前のように書かれる日が来るのだろうか。






2008-06-16[n年前へ]
■ブレーキングとコーナリングの荷重問題
 車の運転をする時、「各タイヤへの荷重状態」が重要だ、とよく聞くような気がする。あるいは、スキーやスケートをする時も、前後左右への荷重状態、つまりは足裏感覚が重要だと言われる。そして、そういった荷重状態を決める大きな要因は、加速度吸収(サスペンション)と重心移動だとよく聞かされた(ような気がする)。
車の運転をする時、「各タイヤへの荷重状態」が重要だ、とよく聞くような気がする。あるいは、スキーやスケートをする時も、前後左右への荷重状態、つまりは足裏感覚が重要だと言われる。そして、そういった荷重状態を決める大きな要因は、加速度吸収(サスペンション)と重心移動だとよく聞かされた(ような気がする)。
車を走らせるときの荷重状態が前後左右に変化するというのは、直感的には理解できるようでいて、それをちゃんと説明しようとすると、結構難しいことに気づく。たとえば、台車を早く押していて、廊下の角を急いで曲がろうとすると、台車が外に倒れそうになることがよくある。それは、感覚的にはとても自然であるし、現実にも台車は外に倒れてしまう。けれど、その動きを論理立てて説明しようとすると、きちんと説明できない自分に気づくのである。
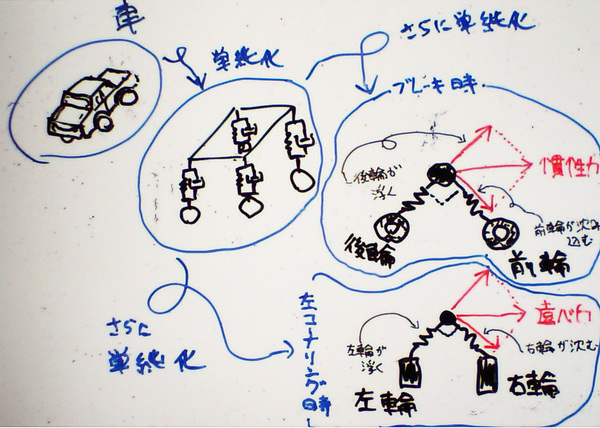
 そこで、車を(これい以上ないくらい)単純なモデルに変えて、ブレーキング時とコーナリング時に働く力、さらにはその力がサスペンションに働き、荷重状態を変える過程を図にしようと試行錯誤してみたのが、下の図である。簡単のために、前後(もしくは、左右のタイヤを90度直行した状態に固定するように繋ぐサスペンションがある、というモデルで絵を描いてみた。
そこで、車を(これい以上ないくらい)単純なモデルに変えて、ブレーキング時とコーナリング時に働く力、さらにはその力がサスペンションに働き、荷重状態を変える過程を図にしようと試行錯誤してみたのが、下の図である。簡単のために、前後(もしくは、左右のタイヤを90度直行した状態に固定するように繋ぐサスペンションがある、というモデルで絵を描いてみた。
つまりは、ブレーキをかけた時に働く慣性力や、コーナリング時に働く遠心力が、90度直行する2本のサスペンションにそれぞれ分配される、というモデルである。こんな単純なモデルであると、図の右の方に書いたように、ブレーキ制動時には前輪が沈み・後輪が浮き、左コーナリング時には「右輪が沈み・左輪が浮く、ということになる。
…が、実際にはこんな風な単純な構造の車はないので、慣性力や遠心力がどの部分にどう働き、どのような荷重状態になっているのかは、やはり今一つよくわからない。また、こういった単純なモデルでは、ロールやピッチやヨーといった、3軸回転を(全体として)表現することができない。誰か、自動車や台車スキーやスケートや…つまりは、ありとあらゆる「乗り物」の荷重状態と動きを簡単にわかりやすく単純明快に説明してはくれないものだろうか。
「オーディオ」機器に関する説明が単純なようでいて、その説明を追いかけ・納得しようとすると難しさ極まりないように、「(趣味の車やスキーといった)スポーツ」に関する解説も、「なるほど」と納得するのは結構難しくて、落ちこぼれてしまうことが多いような気がする。

2009-02-14[n年前へ]
■もしもFreeLine-Skate(フリーラインスケート)に自由自在に乗れたなら
 FreeLine-Skate(フリーラインスケート)
FreeLine-Skate(フリーラインスケート)や「エクスライダー
」を手に入れ、自由自在に乗れるようになってみたい。「スケートボード・スノーボード・インラインスケート、そしてサーフィンの感覚を全て(携帯性抜群で手のひらサイズの)コンパクトに詰め込んだ」という説明を聞いてもよくわからないかもしれないが、右上の写真や簡単な説明、あるいは下に貼り付けた動画(参考動画集)などを見てみると、私と同じくその凄さ・面白さに惹かれる人たちがいるはずだ。
 一回、人気のない山道をインラインスケートで滑り降りようとして、茂みの中に突っ込んで傷だらけになって以来、すぐにやってみる気にはなれないが、この気持ちよさそうな滑走感は一度体験してみたい。
一回、人気のない山道をインラインスケートで滑り降りようとして、茂みの中に突っ込んで傷だらけになって以来、すぐにやってみる気にはなれないが、この気持ちよさそうな滑走感は一度体験してみたい。
2009-04-06[n年前へ]
■インラインスケートの科学~「転んだ瞬間」の「時間の長さ」
 インライン・スケートで滑っているとき、路面の段差に気付かずに乗り上げてしまい、車輪がロックし転ぶことがある。平らに見えるアスファルトでも、結構意外なところに凹凸があるもので、路面の先を見ずに滑っているとひっくり返って肘や掌を強く打ちつけてしまい、痛い思いをしたりする。打ち付けるのはたいていの場合「掌」で、それは転んだ瞬間に手で(結局はその先の掌で)身を守ろうとするからである。
インライン・スケートで滑っているとき、路面の段差に気付かずに乗り上げてしまい、車輪がロックし転ぶことがある。平らに見えるアスファルトでも、結構意外なところに凹凸があるもので、路面の先を見ずに滑っているとひっくり返って肘や掌を強く打ちつけてしまい、痛い思いをしたりする。打ち付けるのはたいていの場合「掌」で、それは転んだ瞬間に手で(結局はその先の掌で)身を守ろうとするからである。
この前転んだ時、「転んだ瞬間」というのは「どれくらいの長さの時間」なのだろうか、と考えた。たとえば、「力いっぱい滑っているときに、いきなり車輪がロックしたら、地面に衝突するまで何秒くらいなのだろう?」と不思議に思ったわけである。そこで、適当に計算してみた結果が下のラクガキになる。
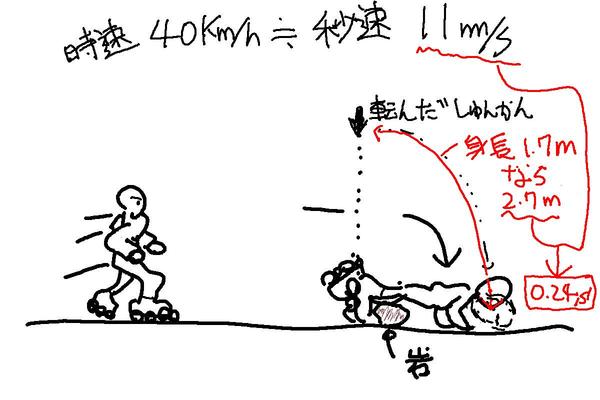
つまり、とても大雑把に単純化されていて、身長1.7mくらいの人が時速40km≒秒速11mで滑っているときに、いきなり車輪がロックしたとする。そして、足先を中心にして頭の先が秒速11mで(1/4の)円運動をして地面に衝突・・・という状況である。「(1/4の)円周」の長さが、身長1.7mの人ならおよそ2.7mになるので、(秒速11mなら)車輪がロックしてから地面にぶつかるまでは「0.24秒」ということになる。「転んだ瞬間」=「0.24秒」なのである。短いけれども、転びつつある頭の中では結構長く感じられそうな、微妙な時間である。
他の場合、たとえば、自転車で全力で走っているとき、バナナの皮の上でコントのように滑ってしまったとき…それぞれの「転んだ瞬間」の「時間の長さ」は一体どのくらいなのだろうか。

2009-05-15[n年前へ]
■「スラローム」スケート始めました。
 スラローム・スケートを見たことをきっかけに、スラローム・スケートを見よう見まねで始めました。車輪部分を取り外すことができるHYPNO(ヒプノ)
のシューズを、久しぶりに、引っ張り出し駐車場でたまに練習しています。「HYPNOは柔らかくて(剛性がなく)頼りにならないから、ちゃんとした靴を買った方が滑りやすいですよ」とアドバイスされつつ、今日も
HYPNOで滑ってきました。
スラローム・スケートを見たことをきっかけに、スラローム・スケートを見よう見まねで始めました。車輪部分を取り外すことができるHYPNO(ヒプノ)
のシューズを、久しぶりに、引っ張り出し駐車場でたまに練習しています。「HYPNOは柔らかくて(剛性がなく)頼りにならないから、ちゃんとした靴を買った方が滑りやすいですよ」とアドバイスされつつ、今日も
HYPNOで滑ってきました。
 毎日5mほどA-bike(風自転車)で走っています。剛性もなく、ブレーキもネジが緩んで効かなくなったりする超小型折りたたみ自転車ですが、手入れをしている限りは、とても気楽に手軽に乗ることができます。・・・というと、一回、交差点でウィリーをして転びましたから、語弊がありそうです。けれど、少なくともHYPNOでスラローム・スケートの練習をしている時よりは遥かに気を使わずに足を動かし、気楽に進むことができます。
毎日5mほどA-bike(風自転車)で走っています。剛性もなく、ブレーキもネジが緩んで効かなくなったりする超小型折りたたみ自転車ですが、手入れをしている限りは、とても気楽に手軽に乗ることができます。・・・というと、一回、交差点でウィリーをして転びましたから、語弊がありそうです。けれど、少なくともHYPNOでスラローム・スケートの練習をしている時よりは遥かに気を使わずに足を動かし、気楽に進むことができます。
 つまるところ、どんなものにもリスクとメリットが表裏一体で付いてきます。A-bike(風自転車)は、メンテナンスを欠かさなければ、リスクよりメリットの方が高いように思います。けれど、「スラローム」スケートの方は、メリットが「楽しさ」と「(ちょっとハードな)エクササイズ」だけかもしれません。だから、リスクとメリットの収支決算は少し分が悪いようにも感じられます。・・・とはいえ、「遊び」はポートフォリオで選ぶこともないでしょうから、趣味・楽しみの世界では、少し赤字で負け気味くらいの方が良いのかもしれません。
つまるところ、どんなものにもリスクとメリットが表裏一体で付いてきます。A-bike(風自転車)は、メンテナンスを欠かさなければ、リスクよりメリットの方が高いように思います。けれど、「スラローム」スケートの方は、メリットが「楽しさ」と「(ちょっとハードな)エクササイズ」だけかもしれません。だから、リスクとメリットの収支決算は少し分が悪いようにも感じられます。・・・とはいえ、「遊び」はポートフォリオで選ぶこともないでしょうから、趣味・楽しみの世界では、少し赤字で負け気味くらいの方が良いのかもしれません。

